building_with_espdl-2-failure 本人代码 正常部分 这部分要注意windows的python库是_.pyd 形式,而linux是esp-dl的git库中同名的_.so 文件。
1 2 3 4 from optimizer import *from calibrator import *from evaluator import *
1 2 onnx_model = onnx.load("handrecognition_model.onnx" )
1 2 optimized_model_path = optimize_fp_model("handrecognition_model.onnx" )
打印模型的计算图信息 代码 1 2 3 4 optimized_model = onnx.load(optimized_model_path)print ("Optimized ONNX model loaded successfully." )print (onnx.helper.printable_graph(optimized_model.graph))
输出 Optimized ONNX model loaded successfully.
graph tf2onnx (
%conv2d_input[FLOAT, unk__33x96x96x1]
) initializers (
%new_shape__31[INT64, 4]
%const_fold_opt__32[INT64, 2]
%StatefulPartitionedCall/sequential/dense_1/MatMul/ReadVariableOp:0[FLOAT, 128x6]
%StatefulPartitionedCall/sequential/dense_1/BiasAdd/ReadVariableOp:0[FLOAT, 6]
%StatefulPartitionedCall/sequential/dense/MatMul/ReadVariableOp:0[FLOAT, 6400x128]
%StatefulPartitionedCall/sequential/dense/BiasAdd/ReadVariableOp:0[FLOAT, 128]
%StatefulPartitionedCall/sequential/conv2d_2/Conv2D/ReadVariableOp:0[FLOAT, 64x64x3x3]
%StatefulPartitionedCall/sequential/conv2d_2/BiasAdd/ReadVariableOp:0[FLOAT, 64]
%StatefulPartitionedCall/sequential/conv2d_1/Conv2D/ReadVariableOp:0[FLOAT, 64x32x3x3]
%StatefulPartitionedCall/sequential/conv2d_1/BiasAdd/ReadVariableOp:0[FLOAT, 64]
%StatefulPartitionedCall/sequential/conv2d/Conv2D/ReadVariableOp:0[FLOAT, 32x1x5x5]
%StatefulPartitionedCall/sequential/conv2d/BiasAdd/ReadVariableOp:0[FLOAT, 32]
) {
%StatefulPartitionedCall/sequential/conv2d/BiasAdd__6:0 = Reshape(%conv2d_input, %new_shape__31)
%StatefulPartitionedCall/sequential/conv2d/BiasAdd:0 = Conv[dilations = [1, 1], group = 1, kernel_shape = [5, 5], strides = [1, 1]](%StatefulPartitionedCall/sequential/conv2d/BiasAdd__6:0, %StatefulPartitionedCall/sequential/conv2d/Conv2D/ReadVariableOp:0, %StatefulPartitionedCall/sequential/conv2d/BiasAdd/ReadVariableOp:0)
%StatefulPartitionedCall/sequential/conv2d/Relu:0 = Relu(%StatefulPartitionedCall/sequential/conv2d/BiasAdd:0)
%StatefulPartitionedCall/sequential/max_pooling2d/MaxPool:0 = MaxPool[kernel_shape = [2, 2], strides = [2, 2]](%StatefulPartitionedCall/sequential/conv2d/Relu:0)
%StatefulPartitionedCall/sequential/conv2d_1/BiasAdd:0 = Conv[dilations = [1, 1], group = 1, kernel_shape = [3, 3], strides = [1, 1]](%StatefulPartitionedCall/sequential/max_pooling2d/MaxPool:0, %StatefulPartitionedCall/sequential/conv2d_1/Conv2D/ReadVariableOp:0, %StatefulPartitionedCall/sequential/conv2d_1/BiasAdd/ReadVariableOp:0)
%StatefulPartitionedCall/sequential/conv2d_1/Relu:0 = Relu(%StatefulPartitionedCall/sequential/conv2d_1/BiasAdd:0)
%StatefulPartitionedCall/sequential/max_pooling2d_1/MaxPool:0 = MaxPool[kernel_shape = [2, 2], strides = [2, 2]](%StatefulPartitionedCall/sequential/conv2d_1/Relu:0)
%StatefulPartitionedCall/sequential/conv2d_2/BiasAdd:0 = Conv[dilations = [1, 1], group = 1, kernel_shape = [3, 3], strides = [1, 1]](%StatefulPartitionedCall/sequential/max_pooling2d_1/MaxPool:0, %StatefulPartitionedCall/sequential/conv2d_2/Conv2D/ReadVariableOp:0, %StatefulPartitionedCall/sequential/conv2d_2/BiasAdd/ReadVariableOp:0)
%StatefulPartitionedCall/sequential/conv2d_2/Relu:0 = Relu(%StatefulPartitionedCall/sequential/conv2d_2/BiasAdd:0)
%StatefulPartitionedCall/sequential/max_pooling2d_2/MaxPool:0 = MaxPool[kernel_shape = [2, 2], strides = [2, 2]](%StatefulPartitionedCall/sequential/conv2d_2/Relu:0)
%StatefulPartitionedCall/sequential/max_pooling2d_2/MaxPool__28:0 = Transpose[perm = [0, 2, 3, 1]](%StatefulPartitionedCall/sequential/max_pooling2d_2/MaxPool:0)
%StatefulPartitionedCall/sequential/flatten/Reshape:0 = Reshape(%StatefulPartitionedCall/sequential/max_pooling2d_2/MaxPool__28:0, %const_fold_opt__32)
%StatefulPartitionedCall/sequential/dense/MatMul:0 = MatMul(%StatefulPartitionedCall/sequential/flatten/Reshape:0, %StatefulPartitionedCall/sequential/dense/MatMul/ReadVariableOp:0)
%StatefulPartitionedCall/sequential/dense/BiasAdd:0 = Add(%StatefulPartitionedCall/sequential/dense/MatMul:0, %StatefulPartitionedCall/sequential/dense/BiasAdd/ReadVariableOp:0)
%StatefulPartitionedCall/sequential/dense/Relu:0 = Relu(%StatefulPartitionedCall/sequential/dense/BiasAdd:0)
%StatefulPartitionedCall/sequential/dense_1/MatMul:0 = MatMul(%StatefulPartitionedCall/sequential/dense/Relu:0, %StatefulPartitionedCall/sequential/dense_1/MatMul/ReadVariableOp:0)
%StatefulPartitionedCall/sequential/dense_1/BiasAdd:0 = Add(%StatefulPartitionedCall/sequential/dense_1/MatMul:0, %StatefulPartitionedCall/sequential/dense_1/BiasAdd/ReadVariableOp:0)
%dense_1 = Softmax(%StatefulPartitionedCall/sequential/dense_1/BiasAdd:0)
return %dense_1
}
加载pickle数据集 代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 import picklewith open ('X_cal.pkl' , 'rb' ) as f:with open ('y_cal.pkl' , 'rb' ) as f:0 :1800 :20 ]'handrecognition_calib.pickle' print ("Calibration dataset loaded and subset selected." )
输出 Calibration dataset loaded and subset selected.
1 2 3 4 5 6 7 8 9 10 11 print ('Generating the quantization table:' )'int16' , 'per-tensor' , 'minmax' )'CPUExecutionProvider' ])
报错部分 代码 就是这部分一直报错,不管是使用自己的1通道、10种代码,还是使用自己的3通道、6种代码,甚至直接运行原作者的model_development文件夹的model_development.ipynb和esp_dl_formate_conversionw文件夹的esp_dl_formate_conversion.py,也是失败,显示ValueError: current model is not supported by esp-dl。
1 2 3 4 5 6 7 8 'esp32s3' , '.' , 'handrecognition_coefficient' , True )print ("Calibration and quantization completed successfully." )
报错输出 Generating the quantization table:
MatMul is not supported on esp-dl yet
---------------------------------------------------------------------------
ValueError Traceback (most recent call last)
/tmp/ipykernel_107082/766837025.py in <module>
12
13 # 生成量化参数
---> 14 calib.generate_quantization_table(model_proto, calib_dataset, pickle_file_path)
15
16 # 导出系数文件
~/code/gesture recognition/calibrator.so in calibrator.Calibrator.generate_quantization_table()
~/code/gesture recognition/calibrator.so in calibrator.Calibrator.generate_output_model()
~/code/gesture recognition/calibrator.so in calibrator.Calibrator.check_model()
(执行到calibrator.Calibrator.check_model的部分有问题)
ValueError: current model is not supported by esp-dl
尝试过的检验方向(均已失败) 模型有效性 代码 1 2 3 4 5 import onnxprint ("Model loaded and verified successfully." )
输出 Model loaded and verified successfully.
数据形状是否符合 代码 1 2 3 4 print (type (calib_dataset))print (calib_dataset.shape) print (calib_dataset[:5 ])
输出 <class 'numpy.ndarray'>
(90, 96, 96, 1)
[[[[0.01176471]
[0.01568627]
[0.01568627]
...
[0.02352941]
[0.01960784]
[0.01960784]]
[[0.01568627]
[0.01960784]
[0.01568627]
...
[0.01960784]
[0.01568627]
[0.01176471]]
[[0.01960784]
[0.01960784]
[0.01568627]
...
[0.01568627]
[0.01568627]
[0.01176471]]
...
[[0.04313725]
[0.07058824]
[0.08627451]
...
[0.01568627]
[0.01568627]
[0.01568627]]
[[0.04705882]
[0.07058824]
[0.07843137]
...
[0.01960784]
[0.01960784]
[0.01568627]]
[[0.04705882]
[0.07058824]
[0.07843137]
...
[0.01960784]
[0.01568627]
[0.01568627]]]
[[[0.01960784]
[0.02352941]
[0.01960784]
...
[0.01960784]
[0.01568627]
[0.01568627]]
[[0.01568627]
[0.01568627]
[0.01960784]
...
[0.01568627]
[0.01960784]
[0.01176471]]
[[0.01960784]
[0.01960784]
[0.02352941]
...
[0.01568627]
[0.01568627]
[0.01568627]]
...
[[0.01960784]
[0.01960784]
[0.01960784]
...
[0.01960784]
[0.01960784]
[0.01960784]]
[[0.01568627]
[0.01960784]
[0.01960784]
...
[0.01176471]
[0.01568627]
[0.01568627]]
[[0.01960784]
[0.01960784]
[0.01960784]
...
[0.01960784]
[0.01960784]
[0.01568627]]]
[[[0.02352941]
[0.01960784]
[0.02352941]
...
[0.02352941]
[0.02352941]
[0.02352941]]
[[0.02352941]
[0.02352941]
[0.02745098]
...
[0.02352941]
[0.02352941]
[0.01568627]]
[[0.02352941]
[0.02352941]
[0.01960784]
...
[0.01960784]
[0.01960784]
[0.02352941]]
...
[[0.01960784]
[0.01960784]
[0.02352941]
...
[0.02352941]
[0.01960784]
[0.01960784]]
[[0.01568627]
[0.01960784]
[0.01960784]
...
[0.02352941]
[0.02352941]
[0.02745098]]
[[0.02352941]
[0.02352941]
[0.02352941]
...
[0.02352941]
[0.02352941]
[0.03137255]]]
[[[0.01568627]
[0.01960784]
[0.01960784]
...
[0.01568627]
[0.01960784]
[0.01568627]]
[[0.01176471]
[0.01960784]
[0.01568627]
...
[0.01568627]
[0.01568627]
[0.01176471]]
[[0.01960784]
[0.01960784]
[0.01960784]
...
[0.01176471]
[0.01568627]
[0.01568627]]
...
[[0.06666667]
[0.05882353]
[0.06666667]
...
[0.01960784]
[0.01568627]
[0.01568627]]
[[0.05882353]
[0.05490196]
[0.05882353]
...
[0.01568627]
[0.01568627]
[0.01568627]]
[[0.05098039]
[0.05098039]
[0.0627451 ]
...
[0.01960784]
[0.01568627]
[0.02352941]]]
[[[0.02745098]
[0.01960784]
[0.02352941]
...
[0.01568627]
[0.01568627]
[0.01568627]]
[[0.01960784]
[0.01960784]
[0.02352941]
...
[0.01960784]
[0.01568627]
[0.01960784]]
[[0.01568627]
[0.01960784]
[0.01960784]
...
[0.01568627]
[0.01568627]
[0.01568627]]
...
[[0.01568627]
[0.01568627]
[0.01960784]
...
[0.01568627]
[0.01960784]
[0.01568627]]
[[0.02352941]
[0.01960784]
[0.01960784]
...
[0.01568627]
[0.01960784]
[0.01568627]]
[[0.01960784]
[0.01568627]
[0.01568627]
...
[0.01960784]
[0.01568627]
[0.02352941]]]]
pickel路径有效性 代码 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 import os'output/handrecognition_calib_params.pickle' if not os.path.exists(output_dir):print (f"Created directory: {output_dir} " )print ("Writable:" , is_writeable)
输出 Writable: True
在第一次显示不可写并且创建了文件夹以后,仍然无法被esp-dl支持,因此也不是读写性的问题。
原作者代码运行证明失败 这部分我把原作者esp_dl_formate_conversion.py拆开到jupyter notebook中创建ipynb(当然前面模型训练部分也是直接使用model_development.ipynb),一步一步执行,最终同样卡在了同样的位置。
1 2 3 4 5 from optimizer import *from calibrator import *from evaluator import *import pickle
1 2 "handrecognition_model.onnx" )
1 2 "handrecognition_model.onnx" )
1 2 3 4 5 6 7 8 with open ('X_cal.pkl' , 'rb' ) as f:with open ('y_cal.pkl' , 'rb' ) as f:0 :1800 :20 ]'handrecognition_calib.pickle'
1 2 3 4 print ('Generating the quantization table:' )'int16' , 'per-tensor' , 'minmax' )
Generating the quantization table:
出错位置 代码 1 2 3 4 5 6 7 8 9 'CPUExecutionProvider' ])'esp32s3' , '.' , 'handrecognition_coefficient' , True )
输出 MatMul is not supported on esp-dl yet
---------------------------------------------------------------------------
ValueError Traceback (most recent call last)
/tmp/ipykernel_102222/2534009994.py in <module>
5 calib.set_providers(['CPUExecutionProvider'])
6 # Obtain the quantization parameter
----> 7 calib.generate_quantization_table(model_proto,calib_dataset, pickle_file_path)
8 # Generate the coefficient files for esp32s3
9 calib.export_coefficient_to_cpp(model_proto, pickle_file_path, 'esp32s3', '.', 'handrecognition_coefficient', True)
~/code/Blogs/ESP-DL/esp_dl_formate_conversion/calibrator.so in calibrator.Calibrator.generate_quantization_table()
~/code/Blogs/ESP-DL/esp_dl_formate_conversion/calibrator.so in calibrator.Calibrator.generate_output_model()
~/code/Blogs/ESP-DL/esp_dl_formate_conversion/calibrator.so in calibrator.Calibrator.check_model()
ValueError: current model is not supported by esp-dl
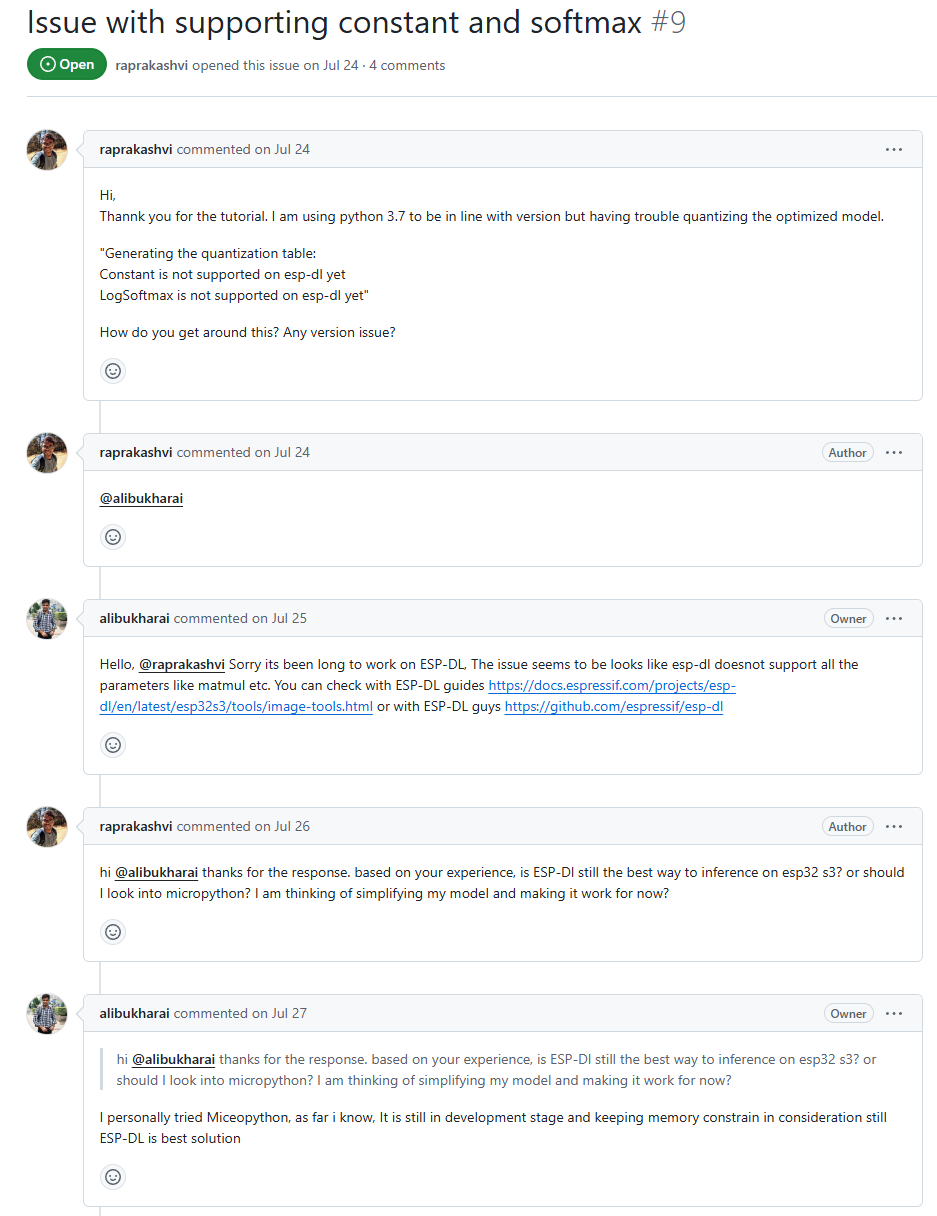
最终,感谢在薛兄的提醒下,发现有人给作者提过这个问题,但作者至今也并未解决:https://github.com/alibukharai/Blogs/issues/9
考虑可能成功的新方向
在windows中搭conda尝试,因为之前只在ubuntu 24.04中尝试过,有可能esp-dl官方库的.pyd能成功,只是.so文件有问题。
更换esp-idf和esp-dl的branch和tag,因为目前使用的是v5.3的idf和release/v1.1的dl,原作者采用的是v4.4的idf和idf4.4的idf。
使用其他的优化和量化模型的工具,esp-dl确实不是很完善。